

Систему навигации буксируемого подводного аппарата запатентовали сотрудники ИрГТУ
23-10-2014, 16:28
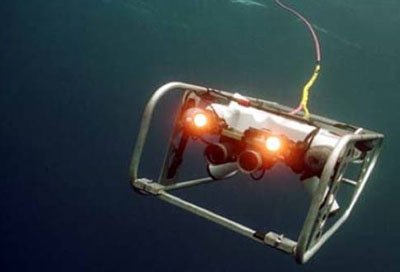
Сотрудники кафедры радиоэлектроники и телекоммуникационных
систем физико-технического института ИрГТУ получили патент РФ на систему
навигации буксируемого подводного аппарата. Авторами изобретения стали заведующий кафедрой Александр Ченский, доцент Владимир
Засенко и аспирант Александр Полетаев. Данная система создавалась в рамках проекта по разработке
гидроакустического комплекса для поиска и мониторинга газовых гидратов.
Изобретение относится к гидроакустическим системам навигации
подводных аппаратов относительно судна и может быть использовано для
определения координат буксируемого подводного аппарата (БПА). Технический
результат изобретения состоит в уменьшении погрешности определения координат.
Применение данной системы позволит существенно снизить трудозатраты при
выполнении подводных исследовательских работ.
 По информации аспиранта А. Полетаева, существуют аналогичные
По информации аспиранта А. Полетаева, существуют аналогичные
системы, в которых применяются различные подходы к определению координат
подводного аппарата. Один из известных вариантов
предусматривает применение буев, на каждом из которых располагается GPS-приемник. Непосредственно под буем находятся антенны-гидрофоны, которые
излучают опорные сигналы. Подводный аппарат определяет свои
координаты, принимая данные гидроакустические сигналы с разных направлений. Недостаток
данного метода заключается в том, что транспортировка и установка буев проблематичны
для экспедиций, которые организуются на
различных акваториях.
Еще один вариант определения координат подразумевает
установку подводных антенн для передачи навигационных сигналов на судне, сопровождающем подводный аппарат. Ранее запатентован метод, когда подводный робот проводит
исследования и через акустический канал связи определяет свои координаты. Между
тем, сотрудники ИрГТУ предлагают применить оборудование для гидролокации дна.
«Акватория, где проводятся исследования, может быть довольно большой. Если в аналоге
робот плавает независимо и имеет низкую скорость, то в нашем случае, чтобы
снять карту акватории, нужно двигаться с
более высокой скоростью. Наш буксируемый
аппарат напрямую связан с судном тросом.
Новизна изобретения заключается в том, что мы используем
комплекс приборов. Система навигации
содержит установленные на буксируемом судне высокоточный GPSприемник,
систему управления, многолучевой эхолот, наборный блок гидролокатора, антенну
подводной навигации и установленные на БПА гидролокатор бокового обзора. При
этом путем фазовой пеленгации определяются координаты подводного аппарата
относительно места, где расположена антенна GPS приемника на буксирующем судне. Система управления производит
корректировку координат методом цифровой
обработки изображений рельефа дна, полученных с помощью гидролокатора бокового
обзора и многолучевого эхолота.
 Подводный аппарат производит гидролокацию дна в довольно
Подводный аппарат производит гидролокацию дна в довольно
узком диапазоне (разрешение по углу). Он находится вблизи дна и позволяет
получить карту в хорошем разрешении», -
рассказал А. Полетаев.
Аспирант пояснил, что изобретение характеризуется узкой
спецификой проведения подводных работ, поэтому для его применения необходим
определенный комплекс оборудования. Эта
разработка находится на стадии внедрения и будет испытана в экспедициях,
которые планируется организовать летом 2015 года.
Ранее сообщалось, что уникальный гидроакустический комплекс
для поиска и мониторинга газовых гидратов, созданный учеными Иркутского
технического университета, состоит из гидролокаторов, профилографов,
информационно-измерительной системы и автономной донной станции. В его
разработке и изготовлении участвовали ученые и специалисты из Иркутска, Москвы
и Санкт-Петербурга. Испытания гидроакустического комплекса показали, что он
может использоваться не только для
поиска и изучения газовых гидратов в Байкале, но также и для других
научных и прикладных задач.
Систему навигации буксируемого подводного аппарата запатентовали сотрудники ИрГТУ
23 октября 2014 года//Наука
Сотрудники кафедры радиоэлектроники и телекоммуникационных
систем физико-технического института ИрГТУ получили патент РФ на систему
навигации буксируемого подводного аппарата. Авторами изобретения стали заведующий кафедрой Александр Ченский, доцент Владимир
Засенко и аспирант Александр Полетаев. Данная система создавалась в рамках проекта по разработке
гидроакустического комплекса для поиска и мониторинга газовых гидратов.
Изобретение относится к гидроакустическим системам навигации
подводных аппаратов относительно судна и может быть использовано для
определения координат буксируемого подводного аппарата (БПА). Технический
результат изобретения состоит в уменьшении погрешности определения координат.
Применение данной системы позволит существенно снизить трудозатраты при
выполнении подводных исследовательских работ.
По информации аспиранта А. Полетаева, существуют аналогичные
системы, в которых применяются различные подходы к определению координат
подводного аппарата. Один из известных вариантов
предусматривает применение буев, на каждом из которых располагается GPS-приемник. Непосредственно под буем находятся антенны-гидрофоны, которые
излучают опорные сигналы. Подводный аппарат определяет свои
координаты, принимая данные гидроакустические сигналы с разных направлений. Недостаток
данного метода заключается в том, что транспортировка и установка буев проблематичны
для экспедиций, которые организуются на
различных акваториях.
Еще один вариант определения координат подразумевает
установку подводных антенн для передачи навигационных сигналов на судне, сопровождающем подводный аппарат. Ранее запатентован метод, когда подводный робот проводит
исследования и через акустический канал связи определяет свои координаты. Между
тем, сотрудники ИрГТУ предлагают применить оборудование для гидролокации дна.
«Акватория, где проводятся исследования, может быть довольно большой. Если в аналоге
робот плавает независимо и имеет низкую скорость, то в нашем случае, чтобы
снять карту акватории, нужно двигаться с
более высокой скоростью. Наш буксируемый
аппарат напрямую связан с судном тросом.
Новизна изобретения заключается в том, что мы используем
комплекс приборов. Система навигации
содержит установленные на буксируемом судне высокоточный GPSприемник,
систему управления, многолучевой эхолот, наборный блок гидролокатора, антенну
подводной навигации и установленные на БПА гидролокатор бокового обзора. При
этом путем фазовой пеленгации определяются координаты подводного аппарата
относительно места, где расположена антенна GPS приемника на буксирующем судне. Система управления производит
корректировку координат методом цифровой
обработки изображений рельефа дна, полученных с помощью гидролокатора бокового
обзора и многолучевого эхолота.
Подводный аппарат производит гидролокацию дна в довольно
узком диапазоне (разрешение по углу). Он находится вблизи дна и позволяет
получить карту в хорошем разрешении», -
рассказал А. Полетаев.
Аспирант пояснил, что изобретение характеризуется узкой
спецификой проведения подводных работ, поэтому для его применения необходим
определенный комплекс оборудования. Эта
разработка находится на стадии внедрения и будет испытана в экспедициях,
которые планируется организовать летом 2015 года.
Ранее сообщалось, что уникальный гидроакустический комплекс
для поиска и мониторинга газовых гидратов, созданный учеными Иркутского
технического университета, состоит из гидролокаторов, профилографов,
информационно-измерительной системы и автономной донной станции. В его
разработке и изготовлении участвовали ученые и специалисты из Иркутска, Москвы
и Санкт-Петербурга. Испытания гидроакустического комплекса показали, что он
может использоваться не только для
поиска и изучения газовых гидратов в Байкале, но также и для других
научных и прикладных задач.
систем физико-технического института ИрГТУ получили патент РФ на систему
навигации буксируемого подводного аппарата. Авторами изобретения стали заведующий кафедрой Александр Ченский, доцент Владимир
Засенко и аспирант Александр Полетаев. Данная система создавалась в рамках проекта по разработке
гидроакустического комплекса для поиска и мониторинга газовых гидратов.
Изобретение относится к гидроакустическим системам навигации
подводных аппаратов относительно судна и может быть использовано для
определения координат буксируемого подводного аппарата (БПА). Технический
результат изобретения состоит в уменьшении погрешности определения координат.
Применение данной системы позволит существенно снизить трудозатраты при
выполнении подводных исследовательских работ.
По информации аспиранта А. Полетаева, существуют аналогичныесистемы, в которых применяются различные подходы к определению координат
подводного аппарата. Один из известных вариантов
предусматривает применение буев, на каждом из которых располагается GPS-приемник. Непосредственно под буем находятся антенны-гидрофоны, которые
излучают опорные сигналы. Подводный аппарат определяет свои
координаты, принимая данные гидроакустические сигналы с разных направлений. Недостаток
данного метода заключается в том, что транспортировка и установка буев проблематичны
для экспедиций, которые организуются на
различных акваториях.
Еще один вариант определения координат подразумевает
установку подводных антенн для передачи навигационных сигналов на судне, сопровождающем подводный аппарат. Ранее запатентован метод, когда подводный робот проводит
исследования и через акустический канал связи определяет свои координаты. Между
тем, сотрудники ИрГТУ предлагают применить оборудование для гидролокации дна.
«Акватория, где проводятся исследования, может быть довольно большой. Если в аналоге
робот плавает независимо и имеет низкую скорость, то в нашем случае, чтобы
снять карту акватории, нужно двигаться с
более высокой скоростью. Наш буксируемый
аппарат напрямую связан с судном тросом.
Новизна изобретения заключается в том, что мы используем
комплекс приборов. Система навигации
содержит установленные на буксируемом судне высокоточный GPSприемник,
систему управления, многолучевой эхолот, наборный блок гидролокатора, антенну
подводной навигации и установленные на БПА гидролокатор бокового обзора. При
этом путем фазовой пеленгации определяются координаты подводного аппарата
относительно места, где расположена антенна GPS приемника на буксирующем судне. Система управления производит
корректировку координат методом цифровой
обработки изображений рельефа дна, полученных с помощью гидролокатора бокового
обзора и многолучевого эхолота.
Подводный аппарат производит гидролокацию дна в довольноузком диапазоне (разрешение по углу). Он находится вблизи дна и позволяет
получить карту в хорошем разрешении», -
рассказал А. Полетаев.
Аспирант пояснил, что изобретение характеризуется узкой
спецификой проведения подводных работ, поэтому для его применения необходим
определенный комплекс оборудования. Эта
разработка находится на стадии внедрения и будет испытана в экспедициях,
которые планируется организовать летом 2015 года.
Ранее сообщалось, что уникальный гидроакустический комплекс
для поиска и мониторинга газовых гидратов, созданный учеными Иркутского
технического университета, состоит из гидролокаторов, профилографов,
информационно-измерительной системы и автономной донной станции. В его
разработке и изготовлении участвовали ученые и специалисты из Иркутска, Москвы
и Санкт-Петербурга. Испытания гидроакустического комплекса показали, что он
может использоваться не только для
поиска и изучения газовых гидратов в Байкале, но также и для других
научных и прикладных задач.
Систему навигации буксируемого подводного аппарата запатентовали сотрудники ИрГТУ
23 октября 2014 года//Наука
Сотрудники кафедры радиоэлектроники и телекоммуникационных
систем физико-технического института ИрГТУ получили патент РФ на систему
навигации буксируемого подводного аппарата. Авторами изобретения стали заведующий кафедрой Александр Ченский, доцент Владимир
Засенко и аспирант Александр Полетаев. Данная система создавалась в рамках проекта по разработке
гидроакустического комплекса для поиска и мониторинга газовых гидратов.
Изобретение относится к гидроакустическим системам навигации
подводных аппаратов относительно судна и может быть использовано для
определения координат буксируемого подводного аппарата (БПА). Технический
результат изобретения состоит в уменьшении погрешности определения координат.
Применение данной системы позволит существенно снизить трудозатраты при
выполнении подводных исследовательских работ.
По информации аспиранта А. Полетаева, существуют аналогичныесистемы, в которых применяются различные подходы к определению координат
подводного аппарата. Один из известных вариантов
предусматривает применение буев, на каждом из которых располагается GPS-приемник. Непосредственно под буем находятся антенны-гидрофоны, которые
излучают опорные сигналы. Подводный аппарат определяет свои
координаты, принимая данные гидроакустические сигналы с разных направлений. Недостаток
данного метода заключается в том, что транспортировка и установка буев проблематичны
для экспедиций, которые организуются на
различных акваториях.
Еще один вариант определения координат подразумевает
установку подводных антенн для передачи навигационных сигналов на судне, сопровождающем подводный аппарат. Ранее запатентован метод, когда подводный робот проводит
исследования и через акустический канал связи определяет свои координаты. Между
тем, сотрудники ИрГТУ предлагают применить оборудование для гидролокации дна.
«Акватория, где проводятся исследования, может быть довольно большой. Если в аналоге
робот плавает независимо и имеет низкую скорость, то в нашем случае, чтобы
снять карту акватории, нужно двигаться с
более высокой скоростью. Наш буксируемый
аппарат напрямую связан с судном тросом.
Новизна изобретения заключается в том, что мы используем
комплекс приборов. Система навигации
содержит установленные на буксируемом судне высокоточный GPSприемник,
систему управления, многолучевой эхолот, наборный блок гидролокатора, антенну
подводной навигации и установленные на БПА гидролокатор бокового обзора. При
этом путем фазовой пеленгации определяются координаты подводного аппарата
относительно места, где расположена антенна GPS приемника на буксирующем судне. Система управления производит
корректировку координат методом цифровой
обработки изображений рельефа дна, полученных с помощью гидролокатора бокового
обзора и многолучевого эхолота.
Подводный аппарат производит гидролокацию дна в довольноузком диапазоне (разрешение по углу). Он находится вблизи дна и позволяет
получить карту в хорошем разрешении», -
рассказал А. Полетаев.
Аспирант пояснил, что изобретение характеризуется узкой
спецификой проведения подводных работ, поэтому для его применения необходим
определенный комплекс оборудования. Эта
разработка находится на стадии внедрения и будет испытана в экспедициях,
которые планируется организовать летом 2015 года.
Ранее сообщалось, что уникальный гидроакустический комплекс
для поиска и мониторинга газовых гидратов, созданный учеными Иркутского
технического университета, состоит из гидролокаторов, профилографов,
информационно-измерительной системы и автономной донной станции. В его
разработке и изготовлении участвовали ученые и специалисты из Иркутска, Москвы
и Санкт-Петербурга. Испытания гидроакустического комплекса показали, что он
может использоваться не только для
поиска и изучения газовых гидратов в Байкале, но также и для других
научных и прикладных задач.
Рекомендуем похожее по теме:
Гидроакустический комплекс, созданный учеными ИрГТУ, впервые применят для исследования газогидратов в Байкале

Гидроакустический комплекс, созданный учеными Иркутского технического университета, впервые применят для изучения газогидратов в Байкале. Совместная экспедиция ученых ИрГТУ, Лимнологического ...
Ученые НИ ИрГТУ провели на Байкале испытания гидроакустического комплекса по поиску газовых гидратов

Масштабные испытания гидроакустической системы поиска и мониторинга газовых гидратов провели ученые НИ ИрГТУ совместно со специалистами Лимнологического института СО РАН, ВНИИ «Океангеология» ...
Автономная донная станция и подводный робот для поиска газогидратов будут испытаны летом на Байкале
Устройства будут испытаны летом 2013 года в районе байкальского залива Посольский Сор, где сотрудники Лимнологического института СО РАН обнаружили залежи газогидратов. Подводный робот и автономная донная станция будут испытаны на глубине 500 метров.
Заседание комиссии по организации государственной поддержки и развитию самобытной казачьей культуры Совета при президенте РФ по делам казачества пройдёт в Чите

С 10 по 11 декабря в Чите пройдёт заседание комиссии по организации государственной поддержки и развитию самобытной казачьей культуры, казачьих художественных коллективов, детского творчества Совета при Президенте Российской Федерации по делам казачества.
Прощание с Валентиной Петровной Гужавиной

Прощание с Валентиной Петровной Гужавиной состоится 15 сентября с 12.00. до 13.00. в круглом зале ДК «Современник».
Опрос:
Считаете ли вы коронавирус реальной угрозой?
Спонсоры страницы:
Анонсы:
Реклама:
Коротко по области>> Все новости
В Черемхово владелец кафе предстанет перед судом за оказание услуг, не отвечающих требованиям безопасности
По версии следствия, в летний период на территории придорожного кафе в Черемховском районе при оказании услуг общественного питания на ребенка и его мать напала собака, содержавшаяся на территории кафе в месте свободного доступа посетителей. В результате двухлетнему мальчику и женщине были
В Иркутске мужчине предъявлено обвинение в убийстве, совершенном в 1997 году
Следствием установлено, что 16 апреля 1997 года мужчина встретился в общежитии с разносчицей пенсий и получил деньги. Находясь в комнате, злоумышленник с целью завладения крупной суммой денежных средств вооружился охотничьим ружьем и произвел два выстрела в голову потерпевшей. От полученных
Подтопление талыми водами в ряде районов Иркутской области находится на контроле МЧС России
На фоне высоких дневных температур на территории региона происходит интенсивное снеготаяние и формирование склонового стока. - Главное управление МЧС России по Иркутской области
В правительстве Владимирской области обсудили повышение безопасности дорожного движения на территории региона
В мероприятии принял участие начальник Главного управления по обеспечению безопасности дорожного движения МВД России генерал-лейтенант полиции Михаил Черников
В Нижнеилимском районе суд вынес обвинительный приговор мужчине за незаконное хранение взрывчатых веществ, оружия и боеприпасов
С учетом мнения прокурора ему назначено наказание в виде 3 лет и 3 месяцев лишения свободы условно с испытательным сроком 3 года, а также штрафом в размере 20 тысяч рублей.
Добавить комментарий!